선형대수 개념 정리
선형대수 개념 정리
Vector
- 벡터란?
- 벡터 공간 $V$의 원소 (엄밀한 정의)
- 1-D array of numbers (in Computer Science)
- 이후 모든 정의는 Computer Science의 방식을 따름
- # of elements in a vector = size(dimension, length) of a vector
- 스칼라
Matrices
- 2-D array of numbers
- $A \in \mathbb{R}^{m \times n}$
Tensor
- 다차원 배열의 일반화된 개념
- 텐서의 차원 (rank)
- 스칼라: 0차 텐서
- 벡터: 1차 텐서
- 행렬: 2차 텐서
- 3차원 이상의 텐서
- 텐서의 표기법
- $\mathcal{T} \in \mathbb{R}^{n_1 \times n_2 \times \cdots \times n_k}$
- 예시:
- RGB 이미지 텐서
- 3차원 텐서로 표현
- 크기: $height \times width \times 3$
- 각 채널 (R, G, B)은 2차원 행렬
- 예시: \(\mathcal{I} = \begin{pmatrix} \begin{pmatrix} r_{11} & r_{12} & \cdots & r_{1w} \\ r_{21} & r_{22} & \cdots & r_{2w} \\ \vdots & \vdots & \ddots & \vdots \\ r_{h1} & r_{h2} & \cdots & r_{hw} \end{pmatrix} & \begin{pmatrix} g_{11} & g_{12} & \cdots & g_{1w} \\ g_{21} & g_{22} & \cdots & g_{2w} \\ \vdots & \vdots & \ddots & \vdots \\ g_{h1} & g_{h2} & \cdots & g_{hw} \end{pmatrix} & \begin{pmatrix} b_{11} & b_{12} & \cdots & b_{1w} \\ b_{21} & b_{22} & \cdots & b_{2w} \\ \vdots & \vdots & \ddots & \vdots \\ b_{h1} & b_{h2} & \cdots & b_{hw} \end{pmatrix} \end{pmatrix}\)
- 영상 텐서
- 비디오 데이터는 4차원 텐서로 표현
- 크기: $frames \times height \times width \times channels$
- 각 프레임은 3차원 텐서 (RGB 이미지)
- 예시: \(\mathcal{V} = \begin{pmatrix} \mathcal{I}_1 \\ \mathcal{I}_2 \\ \vdots \\ \mathcal{I}_f \end{pmatrix}\)
- 비디오 데이터는 4차원 텐서로 표현
- RGB 이미지 텐서
Identity Matrix
- 대각 원소가 모두 1이고 나머지는 0인 행렬
- 항등 행렬 $I \in \mathbb{R}^{n \times n}$
- 항등 행렬의 성질
- $AI_n = A \ (\forall A \in \mathbb{R}^{m \times n})$
- $I_mA = A \ (\forall A \in \mathbb{R}^{m \times n})$
- $I^T = I$
- $I^{-1} = I$
Diagonal Matrix
- 대각 원소 외의 모든 원소가 0인 행렬
- 대각 행렬 $D \in \mathbb{R}^{n \times n}$
- 대각 행렬의 성질
- $D^T = D$
- $D^{-1}$는 존재할 경우 대각 행렬
- $D_1D_2 = D_2D_1$ (대각 행렬 간의 곱셈은 교환 법칙이 성립)
- Also denoted: \(D = \text{diag}(d_{11}, d_{22}, \ldots, d_{nn})\)
Matrix-Matrix multiplication
- 두 행렬 $A \in \mathbb{R}^{m \times n}$, $B \in \mathbb{R}^{n \times p}$의 곱 $C \in \mathbb{R}^{m \times p}$는 다음과 같이 정의됨
- 각 원소 $c_{ij}$는 다음과 같이 계산됨
- 행렬 곱셈의 성질
- 결합 법칙: $A(BC) = (AB)C$
- 분배 법칙: $A(B + C) = AB + AC$
- 일반적으로 교환 법칙은 성립하지 않음: $AB \neq BA$
- 예시:
- $A \in \mathbb{R}^{2 \times 3}$, $B \in \mathbb{R}^{3 \times 2}$인 경우
Vector-Vector Product
- 내적 (Dot Product)
- 두 벡터 $\vec{a}, \vec{b} \in \mathbb{R}^n$의 내적은 다음과 같이 정의됨 \(\vec{a} \cdot \vec{b} = \sum_{i=1}^{n} a_i b_i\)
- 예시: \(\vec{a} = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix}, \quad \vec{b} = \begin{pmatrix} 4 \\ 5 \\ 6 \end{pmatrix}\) \(\vec{a} \cdot \vec{b} = 1 \cdot 4 + 2 \cdot 5 + 3 \cdot 6 = 32\)
- 외적 (Cross Product)
- 두 벡터 $\vec{a}, \vec{b} \in \mathbb{R}^3$의 외적은 다음과 같이 정의됨 \(\vec{a} \times \vec{b} = \begin{pmatrix} a_2 b_3 - a_3 b_2 \\ a_3 b_1 - a_1 b_3 \\ a_1 b_2 - a_2 b_1 \end{pmatrix}\)
- 예시: \(\vec{a} = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix}, \quad \vec{b} = \begin{pmatrix} 4 \\ 5 \\ 6 \end{pmatrix}\) \(\vec{a} \times \vec{b} = \begin{pmatrix} 2 \cdot 6 - 3 \cdot 5 \\ 3 \cdot 4 - 1 \cdot 6 \\ 1 \cdot 5 - 2 \cdot 4 \end{pmatrix} = \begin{pmatrix} -3 \\ 6 \\ -3 \end{pmatrix}\)
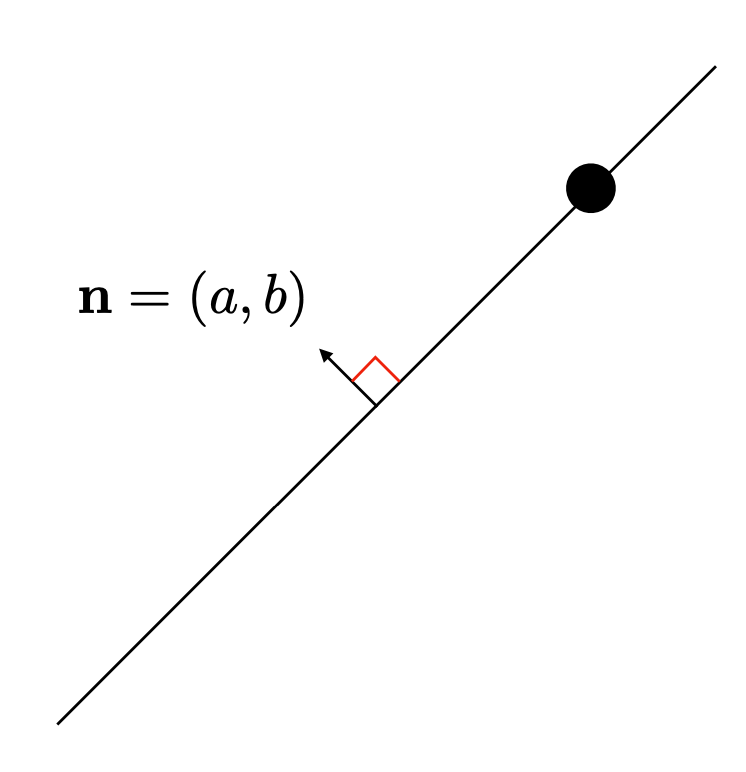
Representing 2D lines via Vector-Vector Product
Matrix-Vector Product
- $A \in \mathbb{R}^{m\times n}$ 의 행을 중심으로 볼 때:
- $A$의 각 행을 $\vec{a}_i^T$로 나타낼 수 있음 \(A = \begin{pmatrix} \vec{a}_1^T \\ \vec{a}_2^T \\ \vdots \\ \vec{a}_m^T \end{pmatrix}\)
- $A\vec{x}$는 각 $\vec{a}_i^T$와 $\vec{x}$의 내적을 포함하는 벡터 \(A\vec{x} = \begin{pmatrix} \vec{a}_1^T \vec{x} \\ \vec{a}_2^T \vec{x} \\ \vdots \\ \vec{a}_m^T \vec{x} \end{pmatrix}\)
- $A \in \mathbb{R}^{m\times n}$ 의 열을 중심으로 볼 때:
- $A$의 각 열을 $\vec{a}_j$로 나타낼 수 있음 \(A = \begin{pmatrix} \vec{a}_1 & \vec{a}_2 & \cdots & \vec{a}_n \end{pmatrix}\)
- $A\vec{x}$는 각 $\vec{a}_j$와 $x_j$의 선형결합(linear combination)으로 나타낼 수 있음 \(A\vec{x} = x_1\vec{a}_1 + x_2\vec{a}_2 + \cdots + x_n\vec{a}_n\)
Hadamard Product (Element-wise Product)
- 두 행렬 $A \in \mathbb{R}^{m \times n}$, $B \in \mathbb{R}^{m \times n}$의 Hadamard 곱 $C \in \mathbb{R}^{m \times n}$는 다음과 같이 정의됨
- 각 원소 $c_{ij}$는 다음과 같이 계산됨
- 예시:
- $A \in \mathbb{R}^{2 \times 3}$, $B \in \mathbb{R}^{2 \times 3}$인 경우
Transpose
- 행렬 $A \in \mathbb{R}^{m \times n}$의 전치는 $A^T \in \mathbb{R}^{n \times m}$로 나타내며, $A$의 행과 열을 뒤바꾼 행렬임
- 전치 행렬의 성질
- $(A^T)^T = A$
- $(A + B)^T = A^T + B^T$
- $(cA)^T = cA^T \ (\forall c \in \mathbb{R})$
- $(AB)^T = B^T A^T$
- 예시:
- $A \in \mathbb{R}^{2 \times 3}$인 경우
Trace
- 행렬 $A \in \mathbb{R}^{n \times n}$의 대각 원소의 합
- trace $tr(A)$는 다음과 같이 정의됨
- 성질
- $tr(A + B) = tr(A) + tr(B)$
- $tr(cA) = c \cdot tr(A) \ (\forall c \in \mathbb{R})$
- $tr(A^T) = tr(A)$
- $tr(AB) = tr(BA)$
- 예시:
- $A \in \mathbb{R}^{3 \times 3}$인 경우
Norms
Vector Norms
- 벡터 $\vec{x} \in \mathbb{R}^n$의 norm은 벡터의 크기를 측정하는 방법
- $p$-norm ($L^p$ norm)
- $p \geq 1$인 경우, $p$-norm은 다음과 같이 정의됨 \(\|\vec{x}\|_p = \left( \sum_{i=1}^{n} |x_i|^p \right)^{\frac{1}{p}}\)
- 특수한 경우:
- $p = 1$: 맨하탄 norm (Manhattan norm) \(\|\vec{x}\|_1 = \sum_{i=1}^{n} |x_i|\)
- $p = 2$: 유클리드 norm (Euclidean norm) \(\|\vec{x}\|_2 = \left( \sum_{i=1}^{n} x_i^2 \right)^{\frac{1}{2}}\)
- $p \rightarrow \infty$: 최대 norm (Maximum norm) \(\|\vec{x}\|_\infty = \max_{i} |x_i|\)
- $p \rightarrow \infty$ 일때 가장 큰 성분이 norm을 결정
- $p = 0$: 제로 norm (Zero norm) \(\|\vec{x}\|_0 = \lim_{p \to 0} \left( \sum_{i=1}^{n} |x_i|^p \right)^{\frac{1}{p}} = \# \\{i \mid x_i \neq 0\\}\)
- 제로 norm은 엄밀히 말해 norm이 아니며(homogeneity 만족하지 못함), 벡터에서 0이 아닌 원소의 개수를 측정함
※ homogeneity: $|\alpha\vec{x}|\ = |\alpha||\vec{x}|$
- 제로 norm은 엄밀히 말해 norm이 아니며(homogeneity 만족하지 못함), 벡터에서 0이 아닌 원소의 개수를 측정함
Matrix Norms
- 행렬 $A \in \mathbb{R}^{m \times n}$의 norm은 행렬의 크기를 측정하는 방법
- 프로베니우스 norm (Frobenius norm)
- 프로베니우스 norm은 행렬의 각 원소의 제곱합의 제곱근으로 정의됨 \(\|A\|_F = \left( \sum_{i=1}^{m} \sum_{j=1}^{n} |a_{ij}|^2 \right)^{\frac{1}{2}}\)
Linearly Dependent and Independent
- 벡터 집합 $\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_k\}$가 주어졌을 때, 이 벡터들이 선형 독립인지 종속인지를 판단할 수 있음
- 선형 독립 (Linearly Independent)
- 벡터 집합 $\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_k\}$가 선형 독립이라는 것은, 이 벡터들 사이에 자명하지 않은 선형 결합이 존재하지 않음을 의미
- 즉, $c_1\vec{v}_1 + c_2\vec{v}_2 + \cdots + c_k\vec{v}_k = \vec{0}$ 일 때, $c_1 = c_2 = \cdots = c_k = 0$ 이어야 함
- 선형 종속 (Linearly Dependent)
- 벡터 집합 $\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_k\}$가 선형 종속이라는 것은, 이 벡터들 사이에 자명하지 않은 선형 결합이 존재함을 의미
- 즉, $c_1\vec{v}_1 + c_2\vec{v}_2 + \cdots + c_k\vec{v}_k = \vec{0}$ 일 때, 적어도 하나의 $c_i \neq 0$ 인 경우가 존재함
- 예시:
- $\vec{v}_1 = \begin{pmatrix} 1 \ 2 \ 3 \end{pmatrix}$, $\vec{v}_2 = \begin{pmatrix} 4 \ 5 \ 6 \end{pmatrix}$, $\vec{v}_3 = \begin{pmatrix} 7 \ 8 \ 9 \end{pmatrix}$인 경우
- $\vec{v}_1, \vec{v}_2, \vec{v}_3$는 선형 종속임
- $-3\vec{v}_1 + 3\vec{v}_2 - \vec{v}_3 = \vec{0}$ 이기 때문
Rank of A Matrix
- 행렬 $A \in \mathbb{R}^{m \times n}$의 rank는 행렬의 선형 독립인 행 또는 열 벡터의 최대 개수
- rank $r(A)$는 다음과 같이 정의됨
- $r(A) = \text{dim}(\text{col space of } A) = \text{dim}(\text{row space of } A)$
- 성질
- $r(A) \leq \min(m, n)$
- $r(A) = r(A^T)$
- $r(AB) \leq \min(r(A), r(B))$
- $r(A+B) \leq r(A)+r(B)$
- 예시:
- $A \in \mathbb{R}^{3 \times 3}$인 경우
Inverse of A Square Matrix
- 역행렬 (Inverse Matrix)
- 정사각 행렬 $A \in \mathbb{R}^{n \times n}$의 역행렬 $A^{-1}$은 $AA^{-1} = A^{-1}A = I$를 만족하는 행렬
- 역행렬이 존재하려면 $A$는 가역적 (invertible)이어야 함
- 역행렬의 성질
- $(A^{-1})^{-1} = A$
- $(AB)^{-1} = B^{-1}A^{-1}$
- $(A^T)^{-1} = (A^{-1})^T$
Span and Projection
Span
- 벡터 집합 $\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_k\}$의 span은 이 벡터들의 선형 결합으로 표현될 수 있는 모든 벡터의 집합
- span $\text{span}(\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_k\})$는 다음과 같이 정의됨 \(\text{span}(\\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_k\\}) = \\{c_1\vec{v}_1 + c_2\vec{v}_2 + \cdots + c_k\vec{v}_k \mid c_1, c_2, \ldots, c_k \in \mathbb{R}\\}\)
- 예시:
- $\vec{v}_1 = \begin{pmatrix} 1 \ 0 \ 0 \end{pmatrix}$, $\vec{v}_2 = \begin{pmatrix} 0 \ 1 \ 0 \end{pmatrix}$인 경우
- $\text{span}(\{\vec{v}_1, \vec{v}_2\})$는 $\mathbb{R}^2$의 모든 벡터를 포함
Projection
$\vec{y} \in \mathbb{R}^m$를 $\text{span}(\{x_1, x_2, \ldots, x_n\})$에 Projection한 결과는 다음과 같은 문제로 정의될 수 있음
\(\arg \min_{\hat{y} \in \text{span}(\\{x_1, x_2, \ldots, x_n\\})} \|\vec{y} - \hat{y}\|_2\)- $\vec{y}$를 $\text{span}(\{x_1, x_2, \ldots, x_n\})$에 정사영한 결과는 $\hat{y}$로 나타낼 수 있음 \(\hat{y} = X(X^TX)^{-1}X^T\vec{y}\)
- 여기서 $X$는 $\{x_1, x_2, \ldots, x_n\}$를 열 벡터로 가지는 행렬 \(X = \begin{pmatrix} | & | & & | \\ x_1 & x_2 & \cdots & x_n \\ | & | & & | \end{pmatrix}\)
- 예시:
- $\vec{y} = \begin{pmatrix} 1 \ 2 \ 3 \end{pmatrix}$, $x_1 = \begin{pmatrix} 1 \ 0 \ 0 \end{pmatrix}$, $x_2 = \begin{pmatrix} 0 \ 1 \ 0 \end{pmatrix}$인 경우
- $\vec{y}$를 $\text{span}(\{x_1, x_2\})$에 정사영한 결과는 $\hat{y} = \begin{pmatrix} 1 \ 2 \ 0 \end{pmatrix}$
Basis and Dimension
- Basis
- 벡터 공간 $V$의 기저 (basis)는 $V$의 모든 벡터를 선형 결합으로 표현할 수 있는 선형 독립 벡터들의 집합
- 기저 $\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_n\}$는 다음과 같은 성질을 가짐
- $\text{span}(\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_n\}) = V$
- $\{\vec{v}_1, \vec{v}_2, \ldots, \vec{v}_n\}$는 선형 독립
- 예시:
- $\mathbb{R}^3$의 표준 기저는 $\{\begin{pmatrix} 1 \ 0 \ 0 \end{pmatrix}, \begin{pmatrix} 0 \ 1 \ 0 \end{pmatrix}, \begin{pmatrix} 0 \ 0 \ 1 \end{pmatrix}\}$
- Dimension
- 벡터 공간 $V$의 차원 (dimension)은 $V$의 기저를 이루는 벡터의 개수
- $\text{dim}(V)$로 나타내며, $V$의 모든 기저는 동일한 개수의 벡터를 가짐
Orthogonal Matrices
Orthogonal and Orthonormal Vectors
- Orthogonal Vectors
- 두 벡터 $\vec{u}, \vec{v} \in \mathbb{R}^n$가 직교한다는 것은, 이 두 벡터의 내적이 0임을 의미 \(\vec{u} \cdot \vec{v} = 0\)
- Orthonormal Vectors
- 두 벡터 $\vec{u}, \vec{v} \in \mathbb{R}^n$가 정규 직교한다는 것은, 이 두 벡터가 직교하고, 각각의 벡터의 norm이 1임을 의미 \(\|\vec{u}\| = 1, \quad \|\vec{v}\| = 1, \quad \vec{u} \cdot \vec{v} = 0\)
- 예시: \(\vec{u} = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}, \quad \vec{v} = \begin{pmatrix} 0 \\ 1 \\ 0 \end{pmatrix}\)
Orthogonal Matrix
- Orthogonal Matrix
- 행렬 $Q \in \mathbb{R}^{n \times n}$가 직교 행렬이라는 것은, $Q$의 열 벡터들이 서로 직교하고, 각 열 벡터의 norm이 1임을 의미
- 즉, $Q$의 열 벡터들이 정규 직교 벡터들로 이루어져 있음
- 직교 행렬의 성질
- $Q^T Q = QQ^T = I$
- $Q^{-1} = Q^T$
- $Q$의 열 벡터와 행 벡터는 모두 정규 직교 벡터들로 이루어져 있음
Rotation Matrix
- 회전 행렬은 벡터를 원점 기준으로 회전시키는 변환을 나타내는 행렬
- 2차원 회전 행렬 $R(\theta) \in \mathbb{R}^{2 \times 2}$는 다음과 같이 정의됨 \(R(\theta) = \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix}\)
- 3차원 회전 행렬은 회전 축에 따라 다르게 정의됨
- $x$축을 기준으로 회전하는 행렬 $R_x(\theta) \in \mathbb{R}^{3 \times 3}$ \(R_x(\theta) = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \cos \theta & -\sin \theta \\ 0 & \sin \theta & \cos \theta \end{pmatrix}\)
- $y$축을 기준으로 회전하는 행렬 $R_y(\theta) \in \mathbb{R}^{3 \times 3}$ \(R_y(\theta) = \begin{pmatrix} \cos \theta & 0 & \sin \theta \\ 0 & 1 & 0 \\ -\sin \theta & 0 & \cos \theta \end{pmatrix}\)
- $z$축을 기준으로 회전하는 행렬 $R_z(\theta) \in \mathbb{R}^{3 \times 3}$ \(R_z(\theta) = \begin{pmatrix} \cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{pmatrix}\)
- 회전 행렬의 성질
- 회전 행렬은 직교 행렬이므로 $R^T R = I$
- 회전 행렬의 역행렬은 전치 행렬과 같음: $R^{-1} = R^T$
- 회전 행렬은 행렬식이 1임: $\det(R) = 1$
Special Orthogonal Group
- Special Orthogonal Group $SO(n)$은 $n \times n$ 정사각 행렬들로 이루어진 집합으로, 이 행렬들은 다음 두 조건을 만족함
- 행렬의 행과 열이 정규 직교 벡터들로 이루어져 있음
- 행렬의 행렬식(determinant)이 1임
- 회전행렬은 $SO(n)$의 원소
Skew Symmetric Matrix
- 전치가 자신의 값에 음을 취한 것과 같은 행렬
- 예시:
- $A \in \mathbb{R}^{3 \times 3}$인 경우
- 스큐 대칭 행렬의 성질
- 대각 원소는 항상 0임
- $A$와 $B$가 스큐 대칭 행렬이면, $A + B$도 스큐 대칭 행렬임
- $cA$도 스큐 대칭 행렬임 ($c \in \mathbb{R}$)
- $A^T A$는 대칭 행렬임
Gram Matrix
- 행렬 $A \in \mathbb{R}^{m \times n}$의 열 벡터들 $\{\vec{a}_1, \vec{a}_2, \ldots, \vec{a}_n\}$이 주어졌을 때, Gram Matrix $G$는 다음과 같이 정의됨
- 예시:
- $A \in \mathbb{R}^{3 \times 2}$인 경우
- Gram Matrix의 성질
- 대칭 행렬: $G = G^T$
- 양의 준정부호 행렬: 모든 고유값이 0 이상
- 벡터 집합이 선형 독립이면, Gram Matrix는 양의 정부호 행렬
Nullspace
- 행렬 $A \in \mathbb{R}^{m \times n}$의 nullspace는 $A\vec{x} = \vec{0}$을 만족하는 모든 $\vec{x} \in \mathbb{R}^n$의 집합
- nullspace $\mathcal{N}(A)$는 다음과 같이 정의됨 \(\mathcal{N}(A) = \\{\vec{x} \in \mathbb{R}^n \mid A\vec{x} = \vec{0}\\}\)
- nullspace의 성질
- $\mathcal{N}(A)$는 $\mathbb{R}^n$의 부분 공간
- $A$의 열 벡터들이 선형 독립이면, $\mathcal{N}(A) = \{\vec{0}\}$
- $A$의 rank와 nullity의 합은 $n$과 같음: $\text{rank}(A) + \text{nullity}(A) = n$
- 예시:
- $A \in \mathbb{R}^{3 \times 3}$인 경우 \(A = \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \end{pmatrix}\) \(\mathcal{N}(A) = \left\\{ \begin{pmatrix} x \\ y \\ z \end{pmatrix} \in \mathbb{R}^3 \mid \begin{pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \end{pmatrix} \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix} \right\\}\) \(\mathcal{N}(A) = \left\\{ \begin{pmatrix} t \\ -2t \\ t \end{pmatrix} \mid t \in \mathbb{R} \right\\}\)
Determinant
- 행렬 $A \in \mathbb{R}^{n \times n}$의 determinant는 $A$가 확장하는 크기를 나타내는 값
- determinant $det(A)$는 다음과 같이 정의됨
- 여기서 $S_n$은 $n$개의 원소에 대한 순열 집합, $\text{sgn}(\sigma)$는 순열 $\sigma$의 부호
- 성질
- $det(A^T) = det(A)$
- $det(AB) = det(A) \cdot det(B)$
- $det(A^{-1}) = \frac{1}{det(A)}$ (역행렬이 존재할 경우)
- $det(cA) = c^n \cdot det(A) \ (\forall c \in \mathbb{R})$
- $A$가 가역 행렬일 때, $det(A) \neq 0$
- 예시:
- $A \in \mathbb{R}^{3 \times 3}$인 경우
Quadratic Forms
- 벡터 $\vec{x} \in \mathbb{R}^n$와 대칭 행렬 $A \in \mathbb{R}^{n \times n}$에 대해, 이차 형식 $Q(\vec{x})$는 다음과 같이 정의됨 \(Q(\vec{x}) = \vec{x}^T A \vec{x}\)
- 예시:
- $\vec{x} = \begin{pmatrix} 1 \ 2 \end{pmatrix}$, $A = \begin{pmatrix} 3 & 4 \ 4 & 5 \end{pmatrix}$인 경우 \(Q(\vec{x}) = \begin{pmatrix} 1 & 2 \end{pmatrix} \begin{pmatrix} 3 & 4 \\ 4 & 5 \end{pmatrix} \begin{pmatrix} 1 \\ 2 \end{pmatrix} = 1 \cdot 3 \cdot 1 + 1 \cdot 4 \cdot 2 + 2 \cdot 4 \cdot 1 + 2 \cdot 5 \cdot 2 = 3 + 8 + 8 + 20 = 39\)
- 이차 형식의 성질
- $Q(\vec{x})$는 항상 실수 값을 가짐
- $A$가 양의 정부호 행렬이면, $Q(\vec{x}) > 0 \ (\forall \vec{x} \neq \vec{0})$
- $A$가 양의 준정부호 행렬이면, $Q(\vec{x}) \geq 0 \ (\forall \vec{x})$
- $A$가 음의 정부호 행렬이면, $Q(\vec{x}) < 0 \ (\forall \vec{x} \neq \vec{0})$
- $A$가 음의 준정부호 행렬이면, $Q(\vec{x}) \leq 0 \ (\forall \vec{x})$
- $A$가 부호가 없는 행렬이면, $Q(\vec{x})$는 양수와 음수 모두 가질 수 있음
- 이차 형식의 예시:
- $\vec{x} = \begin{pmatrix} 1 \ 2 \ 3 \end{pmatrix}$, $A = \begin{pmatrix} 1 & 0 & 0 \ 0 & 1 & 0 \ 0 & 0 & 1 \end{pmatrix}$인 경우 \(Q(\vec{x}) = \begin{pmatrix} 1 & 2 & 3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix} \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix} = 1 \cdot 1 \cdot 1 + 2 \cdot 1 \cdot 2 + 3 \cdot 1 \cdot 3 = 1 + 4 + 9 = 14\)
 위와 같이 다양한 모양의 그래프를 다음과 같은 식으로 일반화해 표현 가능 \(ax^2+bxy+cy^2+dx+ey+f=0\) 이를 이차 형식으로 다시 표현하면 \(\begin{pmatrix} x & y & 1 \end{pmatrix} \begin{pmatrix} a & \frac{b}{2} & \frac{d}{2} \\ \frac{b}{2} & c & \frac{e}{2} \\ \frac{d}{2} & \frac{e}{2} & f \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} = 0\)
위와 같이 다양한 모양의 그래프를 다음과 같은 식으로 일반화해 표현 가능 \(ax^2+bxy+cy^2+dx+ey+f=0\) 이를 이차 형식으로 다시 표현하면 \(\begin{pmatrix} x & y & 1 \end{pmatrix} \begin{pmatrix} a & \frac{b}{2} & \frac{d}{2} \\ \frac{b}{2} & c & \frac{e}{2} \\ \frac{d}{2} & \frac{e}{2} & f \end{pmatrix} \begin{pmatrix} x \\ y \\ 1 \end{pmatrix} = 0\)
Eigenvalues and Eigenvectors
- 행렬 $A \in \mathbb{R}^{n \times n}$의 고유값 $\lambda$와 고유벡터 $\vec{v}$는 다음 조건을 만족함 \(A\vec{v} = \lambda\vec{v}\)
- 여기서 $\vec{v} \neq \vec{0}$, $\lambda \in \mathbb{R}$
- 고유값 $\lambda$는 다음과 같은 특성 방정식의 해로 구할 수 있음 \(\text{det}(A - \lambda I) = 0\)
- 고유벡터 $\vec{v}$는 고유값 $\lambda$에 대응하는 $\text{null}(A - \lambda I)$의 원소
- 예시:
- $A \in \mathbb{R}^{2 \times 2}$인 경우 \(A = \begin{pmatrix} 4 & 1 \\ 2 & 3 \end{pmatrix}\)
- 고유값 $\lambda$는 다음과 같이 구할 수 있음 \(\text{det}(A - \lambda I) = \text{det}\begin{pmatrix} 4 - \lambda & 1 \\ 2 & 3 - \lambda \end{pmatrix} = (4 - \lambda)(3 - \lambda) - 2 = \lambda^2 - 7\lambda + 10 = 0\)
- $\lambda = 2, 5$
- 고유값 $\lambda = 2$에 대응하는 고유벡터 $\vec{v}$는 다음과 같이 구할 수 있음 \((A - 2I)\vec{v} = \begin{pmatrix} 2 & 1 \\ 2 & 1 \end{pmatrix}\vec{v} = \vec{0}\)
- $\vec{v} = \begin{pmatrix} 1 \ -2 \end{pmatrix}$
- 고유값 $\lambda = 5$에 대응하는 고유벡터 $\vec{v}$는 다음과 같이 구할 수 있음 \((A - 5I)\vec{v} = \begin{pmatrix} -1 & 1 \\ 2 & -2 \end{pmatrix}\vec{v} = \vec{0}\)
- $\vec{v} = \begin{pmatrix} 1 \ 1 \end{pmatrix}$
- 고유값과 고유벡터의 성질
- $A$의 고유값의 합은 $A$의 대각 원소의 합과 같음: $\sum_{i=1}^{n} \lambda_i = \text{tr}(A)$
- $A$의 고유값의 곱은 $A$의 행렬식과 같음: $\prod_{i=1}^{n} \lambda_i = \text{det}(A)$
- $A$가 대칭 행렬이면, 모든 고유값은 실수임
- $A$가 직교 행렬이면, 모든 고유값의 절댓값은 1임
EigenDecomposition
- 행렬 $A \in \mathbb{R}^{n \times n}$는 고유값 분해(EigenDecomposition)할 수 있음
- 고유값 분해는 $A$를 다음과 같이 나타내는 것 \(A = V \Lambda V^{-1}\)
- 여기서 $V$는 $A$의 고유벡터들로 이루어진 행렬, $\Lambda$는 $A$의 고유값들로 이루어진 대각 행렬
- 예시:
- $A \in \mathbb{R}^{2 \times 2}$인 경우 \(A = \begin{pmatrix} 4 & 1 \\ 2 & 3 \end{pmatrix}\)
- $A$의 고유값은 $\lambda_1 = 2$, $\lambda_2 = 5$
- $A$의 고유벡터는 $\vec{v}_1 = \begin{pmatrix} 1 \ -2 \end{pmatrix}$, $\vec{v}_2 = \begin{pmatrix} 1 \ 1 \end{pmatrix}$
- $V$와 $\Lambda$는 다음과 같이 나타낼 수 있음 \(V = \begin{pmatrix} 1 & 1 \\ -2 & 1 \end{pmatrix}, \quad \Lambda = \begin{pmatrix} 2 & 0 \\ 0 & 5 \end{pmatrix}\)
- 따라서 $A$는 다음과 같이 고유값 분해할 수 있음 \(A = V \Lambda V^{-1} = \begin{pmatrix} 1 & 1 \\ -2 & 1 \end{pmatrix} \begin{pmatrix} 2 & 0 \\ 0 & 5 \end{pmatrix} \begin{pmatrix} 1 & 1 \\ -2 & 1 \end{pmatrix}^{-1}\)
- 고유값 분해의 성질
- $A$가 대칭 행렬이면, $V$는 직교 행렬이 됨: $V^T V = I$
- $A$가 대칭 행렬이면, $A$는 다음과 같이 고유값 분해할 수 있음 \(A = Q \Lambda Q^T\)
- 여기서 $Q$는 $A$의 고유벡터들로 이루어진 직교 행렬, $\Lambda$는 $A$의 고유값들로 이루어진 대각 행렬
- $A$가 양의 정부호 행렬이면, 모든 고유값은 양수(그 반대도 성립)
- 예시:
- $A \in \mathbb{R}^{2 \times 2}$인 경우 \(A = \begin{pmatrix} 4 & 1 \\ 1 & 3 \end{pmatrix}\)
- $A$의 고유값은 $\lambda_1 = 5$, $\lambda_2 = 2$
- $A$의 고유벡터는 $\vec{v}_1 = \begin{pmatrix} 1 \ 1 \end{pmatrix}$, $\vec{v}_2 = \begin{pmatrix} -1 \ 1 \end{pmatrix}$
- $Q$와 $\Lambda$는 다음과 같이 나타낼 수 있음 \(Q = \begin{pmatrix} \frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix}, \quad \Lambda = \begin{pmatrix} 5 & 0 \\ 0 & 2 \end{pmatrix}\)
- 따라서 $A$는 다음과 같이 고유값 분해할 수 있음 \(A = Q \Lambda Q^T = \begin{pmatrix} \frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix} \begin{pmatrix} 5 & 0 \\ 0 & 2 \end{pmatrix} \begin{pmatrix} \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ -\frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix}\)
Singular Value Decomposition (SVD)
- SVD는 임의의 $m \times n$ 행렬 $A$를 세 개의 행렬의 곱으로 분해하는 방법 \(A = U \Sigma V^T\)
- 여기서 $U \in \mathbb{R}^{m \times m}$, $\Sigma \in \mathbb{R}^{m \times n}$, $V \in \mathbb{R}^{n \times n}$
- $U$와 $V$는 직교 행렬, $\Sigma$는 대각 행렬
- $\Sigma$의 대각 원소는 $A$의 특이값 (singular values)
- $U$의 열 벡터는 $A$의 좌특이 벡터 (left singular vectors)
$V$의 열 벡터는 $A$의 우특이 벡터 (right singular vectors)
- 특이값 (Singular Values)
- 특이값은 $\Sigma$의 대각 원소로, $A$의 크기를 나타내는 값
- 특이값은 항상 0 이상
- 특이값은 $A^T A$의 고유값의 제곱근으로 구할 수 있음
- 특이 벡터 (Singular Vectors)
- 좌특이 벡터는 $A A^T$의 고유벡터
- 우특이 벡터는 $A^T A$의 고유벡터
- 좌특이 벡터와 우특이 벡터는 각각 $U$와 $V$의 열 벡터
- SVD의 계산 방법
- $A^T A$와 $A A^T$의 고유값과 고유벡터를 계산
- $A^T A$의 고유벡터를 $V$의 열 벡터로 사용
- $A A^T$의 고유벡터를 $U$의 열 벡터로 사용
- $A^T A$의 고유값의 제곱근을 $\Sigma$의 대각 원소로 사용
- SVD의 응용
- 차원 축소 (Dimensionality Reduction)
- 노이즈 제거 (Noise Reduction)
- 데이터 압축 (Data Compression)
- 추천 시스템 (Recommendation Systems)
- 예시
- $A \in \mathbb{R}^{2 \times 2}$인 경우 \(A = \begin{pmatrix} 4 & 0 \\ 3 & -5 \end{pmatrix}\)
- $A^T A$와 $A A^T$의 고유값과 고유벡터를 계산 \(A^T A = \begin{pmatrix} 25 & -15 \\ -15 & 25 \end{pmatrix}, \quad A A^T = \begin{pmatrix} 16 & -15 \\ -15 & 34 \end{pmatrix}\)
- $A^T A$의 고유값은 $\lambda_1 = 40$, $\lambda_2 = 10$
- $A A^T$의 고유값은 $\lambda_1 = 40$, $\lambda_2 = 10$
- $A^T A$의 고유벡터는 $\vec{v}_1 = \begin{pmatrix} 1 \ -1 \end{pmatrix}$, $\vec{v}_2 = \begin{pmatrix} 1 \ 1 \end{pmatrix}$
- $A A^T$의 고유벡터는 $\vec{u}_1 = \begin{pmatrix} 1 \ -1 \end{pmatrix}$, $\vec{u}_2 = \begin{pmatrix} 1 \ 1 \end{pmatrix}$
- $U$, $\Sigma$, $V$는 다음과 같이 나타낼 수 있음 \(U = \begin{pmatrix} \frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \\ -\frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \end{pmatrix}, \quad \Sigma = \begin{pmatrix} \sqrt{40} & 0 \\ 0 & \sqrt{10} \end{pmatrix}, \quad V = \begin{pmatrix} \frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix}\)
- 따라서 $A$는 다음과 같이 SVD할 수 있음 \(A = U \Sigma V^T = \begin{pmatrix} \frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \\ -\frac{1}{\sqrt{2}} & -\frac{1}{\sqrt{2}} \end{pmatrix} \begin{pmatrix} \sqrt{40} & 0 \\ 0 & \sqrt{10} \end{pmatrix} \begin{pmatrix} \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ -\frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{pmatrix}\)
해당 포스트는 서울대학교 컴퓨터공학부 주한별 교수님의 컴퓨터비전 25-1학기 강의를 정리한 내용입니다.
This post is licensed under CC BY 4.0 by the author.