Non-Binary Trees
Non-Binary Trees는 각 노드가 두 개 이상의 자식을 가질 수 있는 트리 구조
ADT
1
2
3
4
5
6
7
8
9
10
11
12
13
| interface GTNode<E>{
public E value();
public boolean isLeaf();
public GTNode<E> parent();
public GTNode<E> leftmostChild();
public GTNode<E> rightSibling();
public void setValue(E value);
public void setParent(GTNode<E> parent);
public void insertFirst(GTNode<E> child);
public void insertNext(GTNode<E> child);
public void removeFirst();
public void removeNext();
}
|
value()는 노드의 값을 반환isLeaf()는 노드가 리프 노드인지 확인parent()는 부모 노드를 반환leftmostChild()는 가장 왼쪽 자식 노드를 반환rightSibling()는 오른쪽 형제 노드를 반환setValue(E value)는 노드의 값을 설정setParent(GTNode<E> parent)는 부모 노드를 설정insertFirst(GTNode<E> child)는 첫 번째 자식 노드를 삽입insertNext(GTNode<E> child)는 다음 형제 노드를 삽입removeFirst()는 첫 번째 자식 노드를 제거removeNext()는 다음 형제 노드를 제거- 이 ADT는 Non-Binary Tree의 기본적인 연산을 정의하며, 각 노드가 여러 자식을 가질 수 있도록 설계됨.
Traversal
- Binary Tree에서는 Preorder, Inorder, Postorder가 정의됨
- Non-Binary Tree에서는 Preorder, Postorder만 정의됨
- Inorder는 왼쪽 자식을 순회하고, 현재 노드를 방문하고, 오른쪽 자식을 순회하는 방식인데, Non-Binary Tree에서는 왼쪽 자식과 오른쪽 자식을 구분할 수 없으므로 정의되지 않음
- Preorder Traversal
1
2
3
4
5
6
7
8
9
10
| static <E> void preorder(GTNode<E> root) {
PrintNode(root);
if (!root.isLeaf()) {
GTNode<E> child = root.leftmostChild();
while (child != null) {
preorder(child);
child = child.rightSibling();
}
}
}
|
- Postorder Traversal
1
2
3
4
5
6
7
8
9
10
| static <E> void postorder(GTNode<E> root) {
if (!root.isLeaf()) {
GTNode<E> child = root.leftmostChild();
while (child != null) {
postorder(child);
child = child.rightSibling();
}
}
PrintNode(root);
}
|
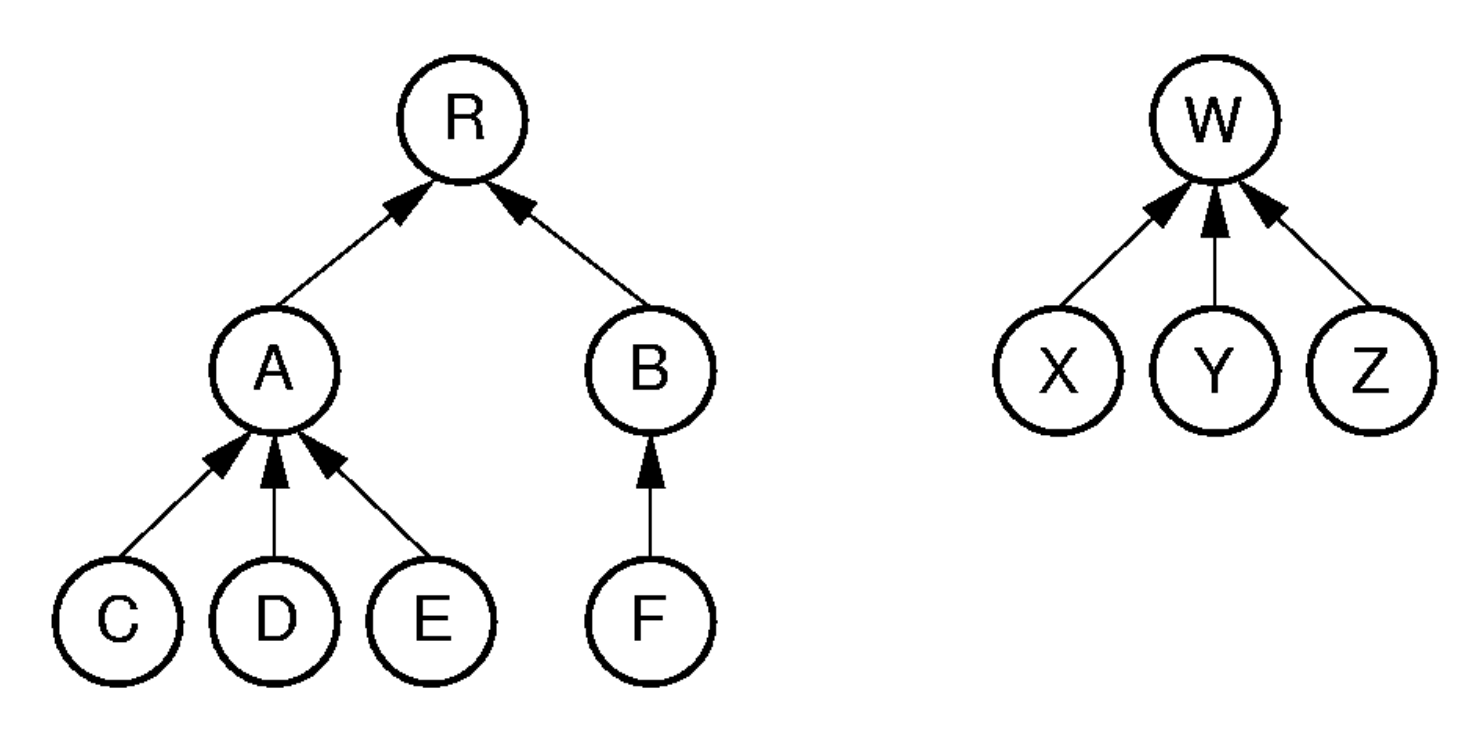
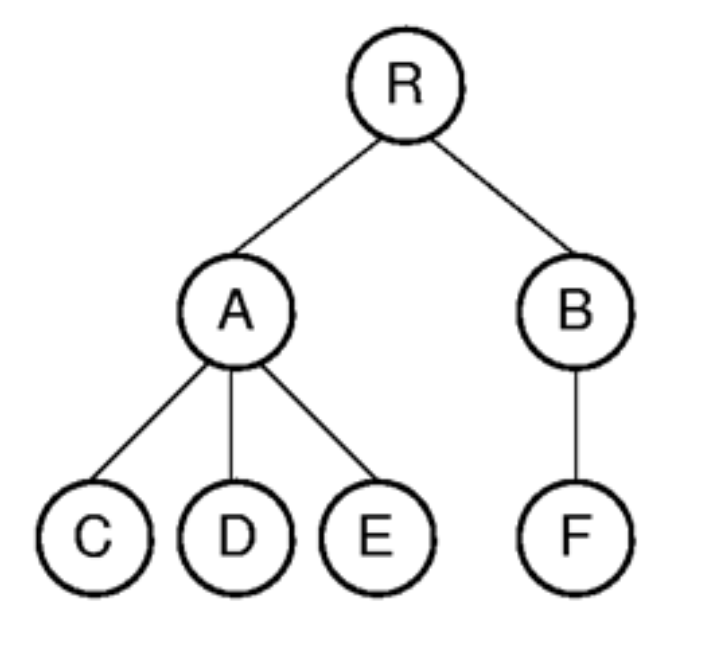
Parent Pointer Implementation
- Non-Binary Tree를 구현할 때, 각 노드가 부모 노드를 가리키는 포인터를 추가하여 구현할 수 있음
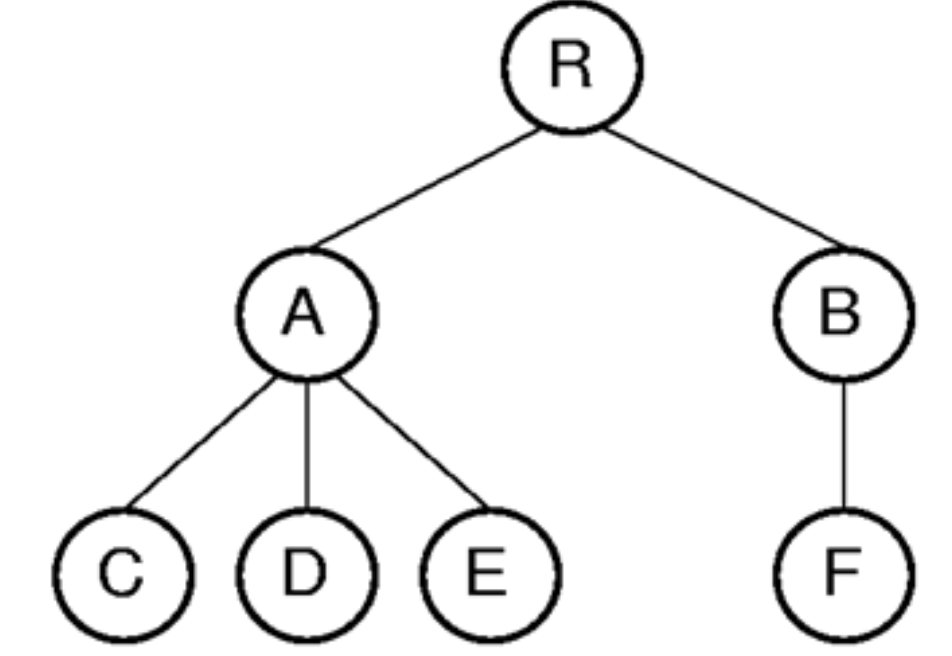
- 위 이미지에 대해, Parent Pointer Implementation을 적용한 결과는 다음과 같음
| Parent’s Index | Label | Node’s Index |
|---|
| Null | R | 0 |
| 0 | A | 1 |
| 0 | B | 2 |
| 1 | C | 3 |
| 1 | D | 4 |
| 1 | E | 5 |
| 2 | F | 6 |
| Null | W | 7 |
| 7 | X | 8 |
| 7 | Y | 9 |
| 7 | Z | 10 |
- 이 구현에서는 각 노드가 부모 노드를 가리키는 포인터를 추가하여, 트리 구조를 표현함
- 서로 다른 두 노드가 한 트리 안에 속하는지의 여부를 쉽게 확인할 수 있음
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| public boolean differ(int a, int b) {
Integer root1 = FIND(a);
Integer root2 = FIND(b);
return root1 != root2;
}
public Integer FIND(Integer x) {
if (parent[x] == null) {
return x;
}
while (parent[x] != null) {
x = parent[x];
}
return x;
}
|
Union-Find
- Union-Find는 두 집합의 비교에 중요하게 사용되는 연산
- Union: 두 집합을 합치는 연산
- Find: 두 원소가 같은 집합에 속하는지 확인하는 연산
Implementation
- Naive Implementation
- Union: $A \cup B$의 모든 원소에 대해 $id(i)$(객체 i가 속한 집합의 대표 원소)를 업데이트, $O(n)$
- Find: $id(i)$를 반환, $O(1)$
- Parent Pointer Implementation
- Union: $A$와 $B$의 root를 찾아서, 한 집합의 root를 다른 집합의 root로 설정, $O(FIND)$
- Find: $id(i)$를 찾을 떄, 부모 루트를 타고 거슬러 올라가면서 찾음, $O(\log n)$
- Path Compression
- Find 연산을 수행할 때, 경로 상의 모든 노드의 부모를 root로 설정하여, 다음 Find 연산에서 더 빠르게 찾을 수 있도록 함
- $O(\log n)$에서 $O(1)$로 최적화됨
- Union
1
2
3
4
5
6
7
| public void union(int a, int b) {
Integer rootA = FIND(a);
Integer rootB = FIND(b);
if (rootA != rootB) {
parent[rootB] = rootA; // rootB의 부모를 rootA로 설정
}
}
|
이때, 두 집합(트리)를 합칠 때, 더 작은 트리를 더 큰 트리의 자식으로 설정하는 것이 효율적임. FIND 연산 등을 수행할 때, 트리의 높이를 최소화하여 탐색 시간을 줄일 수 있기 때문임.
- Weighted union rule
- Union 연산을 수행할 때, 두 트리의 크기를 비교하여 더 작은 트리를 더 큰 트리의 자식으로 설정하는 방법
- 이 방법은 트리의 높이를 최소화하여, 최대 $\log n$의 높이를 유지하게 함
- 증명
- 가정:
- 초기에는 각 노드가 하나의 독립적인 트리 → 높이 0
- n 개의 노드 → n 개의 트리
- 어떤 노드 $v$가 속한 트리 $A$의 높이를 $h$라고 할 때, $h$가 증가하기 위해선 $A$가 더 큰 트리로 합쳐져야 함
| 이때 합쳐진 트리의 크기는 $ | A | $의 최소 두 배 이상이 되어야 함 |
| $ | A | \leq | B | $인 트리 $B$와 합쳐질 때, $ | A \cup B | = | A | + | B | \geq 2 | A | $ |
- 따라서, 트리의 높이가 증가할 때마다 트리의 크기는 최소 두 배 이상 증가하게 됨
- 노드 $v$는 처음에 자기 자신만을 포함하는 트리로 시작하므로, 높이가 $0$일 때 트리의 크기는 $1$이 됨
| 깊이가 늘어날 때마다 트리의 크기는 최소 두 배 이상 증가하게 되므로, 최종 트리 $ | T | $의 크기는 $ | T | \geq 2^h$가 됨 |
| 그런데 트리의 크기는 $n$이므로, $ | T | \leq n$이 됨 |
- 따라서, $2^h \leq n$, 즉 $h \leq \log_2 n$이 성립함
- Path Compression(Find)
- Find 연산을 수행할 때, 경로 상의 모든 노드의 부모를 root로 설정하여, 다음 Find 연산에서 더 빠르게 찾을 수 있도록 함
1
2
3
4
5
6
7
| public Integer FIND(Integer x) {
if (parent[x] == null) {
return x;
}
parent[x] = FIND(parent[x]); // 경로 상의 모든 노드의 부모를 root로 설정
return parent[x];
}
|
General Tree Implementation
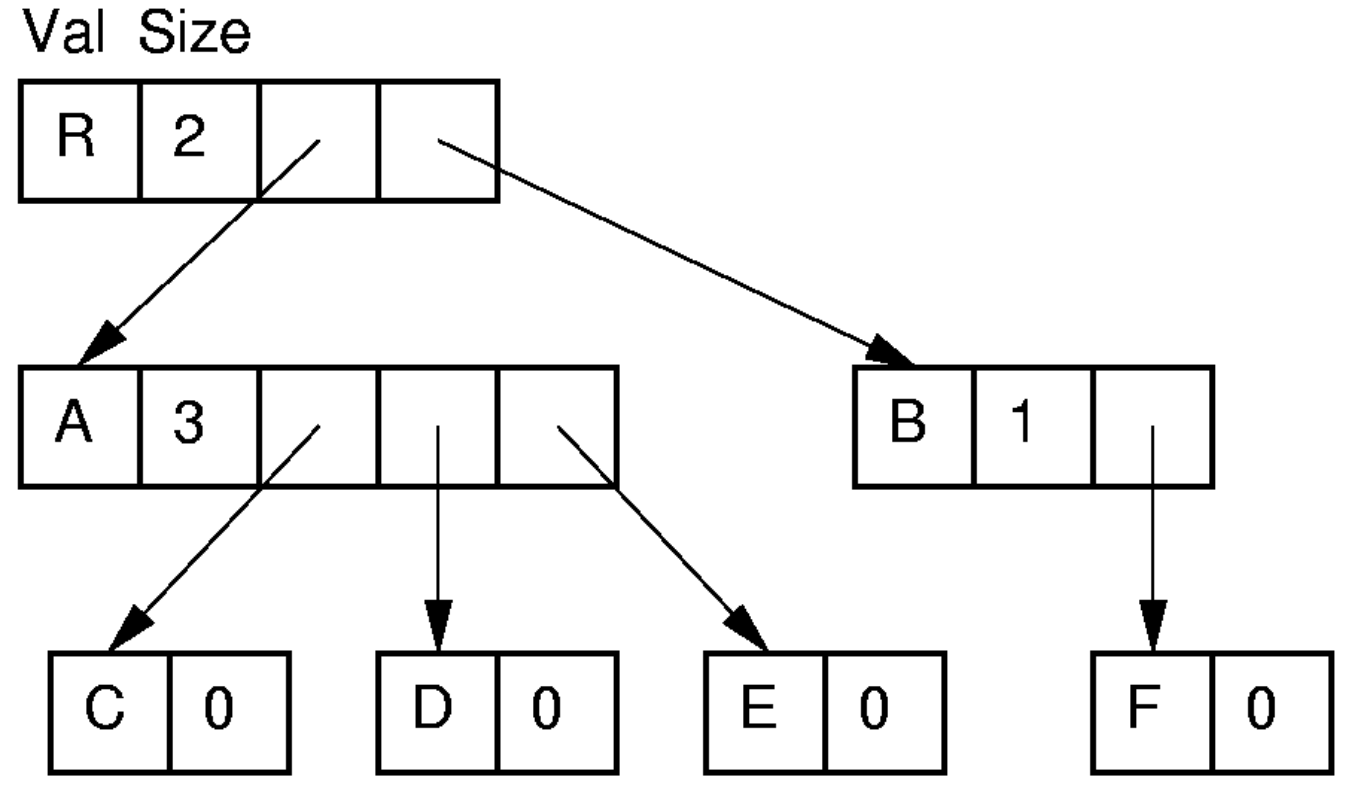
List of Children
- 각 노드가 자식 노드의 리스트를 가지고 있는 방식
- 예:
| Index | Value | Parent | Children |
|---|
| 0 | R | - | [1, 3] |
| 1 | A | 0 | [2, 4, 6] |
| 2 | C | 1 | [] |
| 3 | B | 0 | [5] |
| 4 | D | 1 | [] |
| 5 | F | 3 | [] |
| 6 | E | 1 | [] |
- Pros
parent(), leftmostChild() 연산이 $O(1)$로 빠름- 두 트리가 같은 array에 있다면,
UNION 연산이 효율적- 합쳐지는 트리의 루트 노드에 parent를 설정하고, 자식 리스트에 단순히 추가하는 방식으로 구현 가능
- Cons
rightSibling() 연산이 $O(n)$으로 느림- linked list가 아닌 array-based로 구현할 경우, 노드의 개수를 미리 알아야함
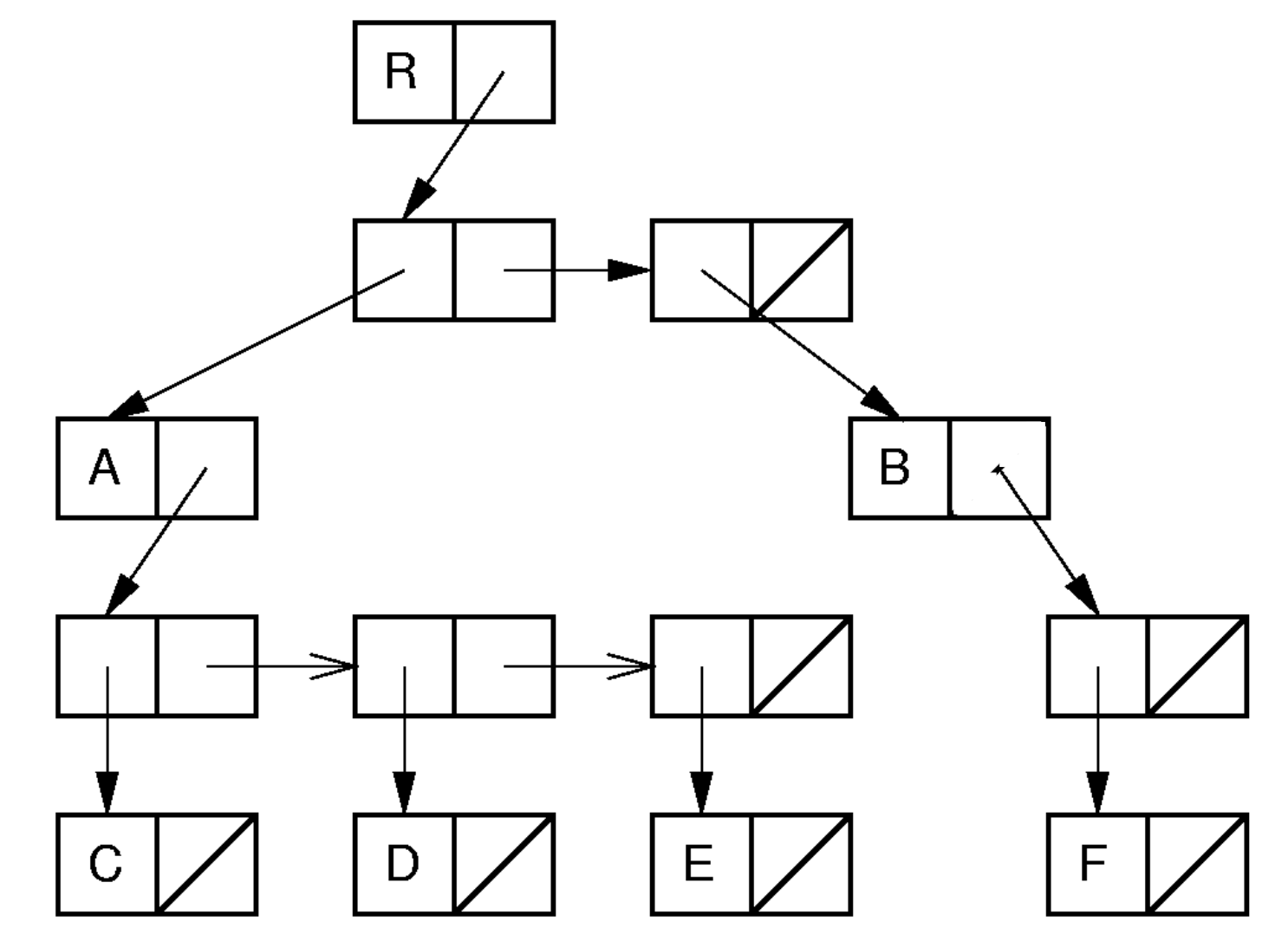
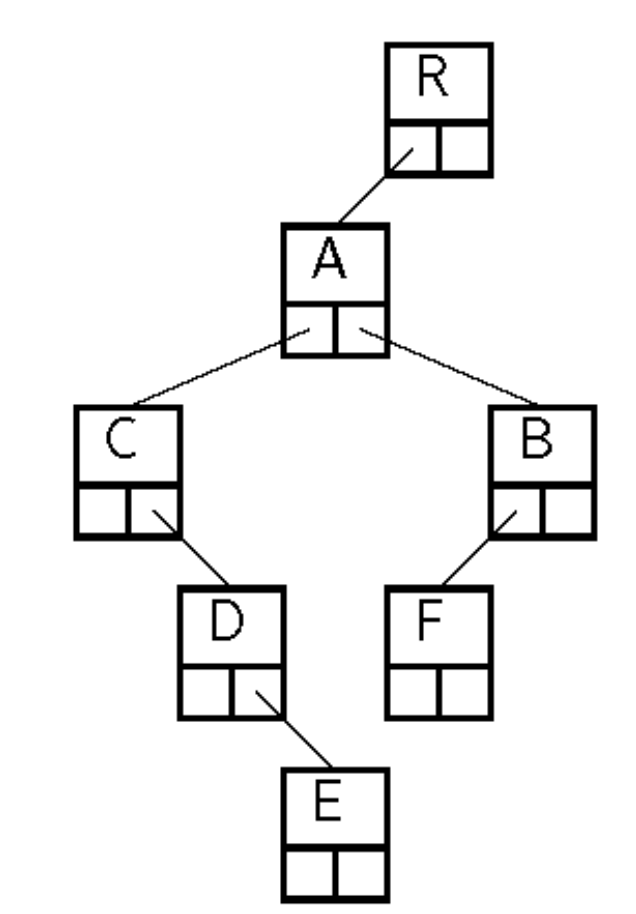
Leftmost Child/Right Sibling
- 각 노드가 왼쪽 자식과 오른쪽 형제 노드를 가리키는 포인터를 가지고 있는 방식
- 예:
| Index | Value | Parent | Leftmost Child | Right Sibling |
|---|
| 0 | R | - | 1 | - |
| 1 | A | 0 | 3 | 2 |
| 2 | B | 0 | 6 | - |
| 3 | C | 1 | - | 4 |
| 4 | D | 1 | - | 5 |
| 5 | E | 1 | - | - |
| 6 | F | 2 | - | - |
- Pros
parent(), leftmostChild(), rightSibling() 연산이 $O(1)$로 빠름- list of children 방식에서는 각 노드마다 자식 리스트를 관리해야 했지만, 이 방식에서는 자식 개수에 상관없이 각 노드가 두 개의 포인터(
leftmostChild, rightSibling)만을 관리하므로, 메모리 사용이 효율적
- Cons
- array-based로 구현할 경우, 노드의 개수를 미리 알아야함
Dynamic Node
- ver-1: List of Children의 Linked List 방식
- Pros
parent(), leftmostChild() 연산이 $O(1)$로 빠름- 두 트리의 결합이 효율적
- 합쳐지는 트리의 루트 노드에 parent를 설정하고, 자식 리스트에 단순히 추가하는 방식으로 구현 가능
- 미리 노드의 개수를 알 필요 없음
- Cons
rightSibling() 연산이 $O(n)$으로 느림- 링크 기반이지만, 자식들을 관리하기 위해 내부적으로 fixed-size array 또는 reallocable array가 필요
- ver-2:
- 이 방식에서는 각 노드가
leftmostChild 포인터, rightSibling 포인터를 자식 수에 상관없이 고정 크기를 가짐 - ver1과 비교해 유연하지만, 더 많은 공간 요구
Dynamic Left-Chid/Right-Sibling
- Non-binary tree를 binary tree처럼 변환해,
leftmostChild는 왼쪽 포인터, rightSibling는 오른쪽 자식 포인터로 저장 - 기존 Left-Chid/Right-Sibling과 비교해 pre-allocate 메모리 필요 없음
- 기존 ver-2와 비교해 더 적은 공간을 씀
Sequential Implementations
- 연산과는 상관 없이, 트리 구조의 공간을 최소화하는 방법이 필요할 때도 있음
- Sequential Implementations는 트리 저장에 최소한의 공간을 사용하는 방법론
- 트리의 노드들을 pre-order로 순회하여, 노드의 값을 배열에 저장
- pointer 저장 필요 없음
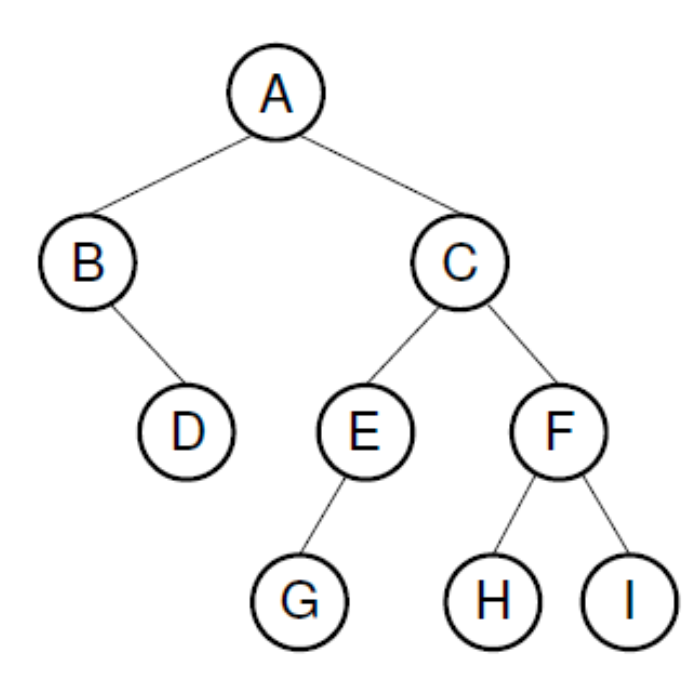
For Binary Trees
- Null pointer를
/로 표시AB/D//CEG///FH//I//- 각
/는 왼쪽 자식 혹은 오른쪽 자식이 없음을 나타냄 - 각 노드 외에도
/를 추가로 저장함으로써 저장되는 overhead가 발생함 - sparse한 트리에서는 공간 낭비가 심함
- Internal Node를 bit로 표시
- 노드 값 옆에
'를 붙여서 Internal Node를 표시 - Full binary tree에서는 null pointer 기호 필요없음
A'B'/DC'E'/G//F'H//I//- Space Overhead: 각 Internal Node마다 1 bit를 추가로 저장
For Non-Binary(General) Trees
- Pre-order로 순회하여, 노드의 값을 배열에 저장
- 각 subtree의 마지막에
)를 추가하여, 각 subtree의 끝을 표시 RAC)D)E))BF)))
해당 포스트는 서울대학교 컴퓨터공학부 강유 교수님의 자료구조 25-1학기 강의를 정리한 내용입니다.